Fifth assignment - Motors!
Circuit


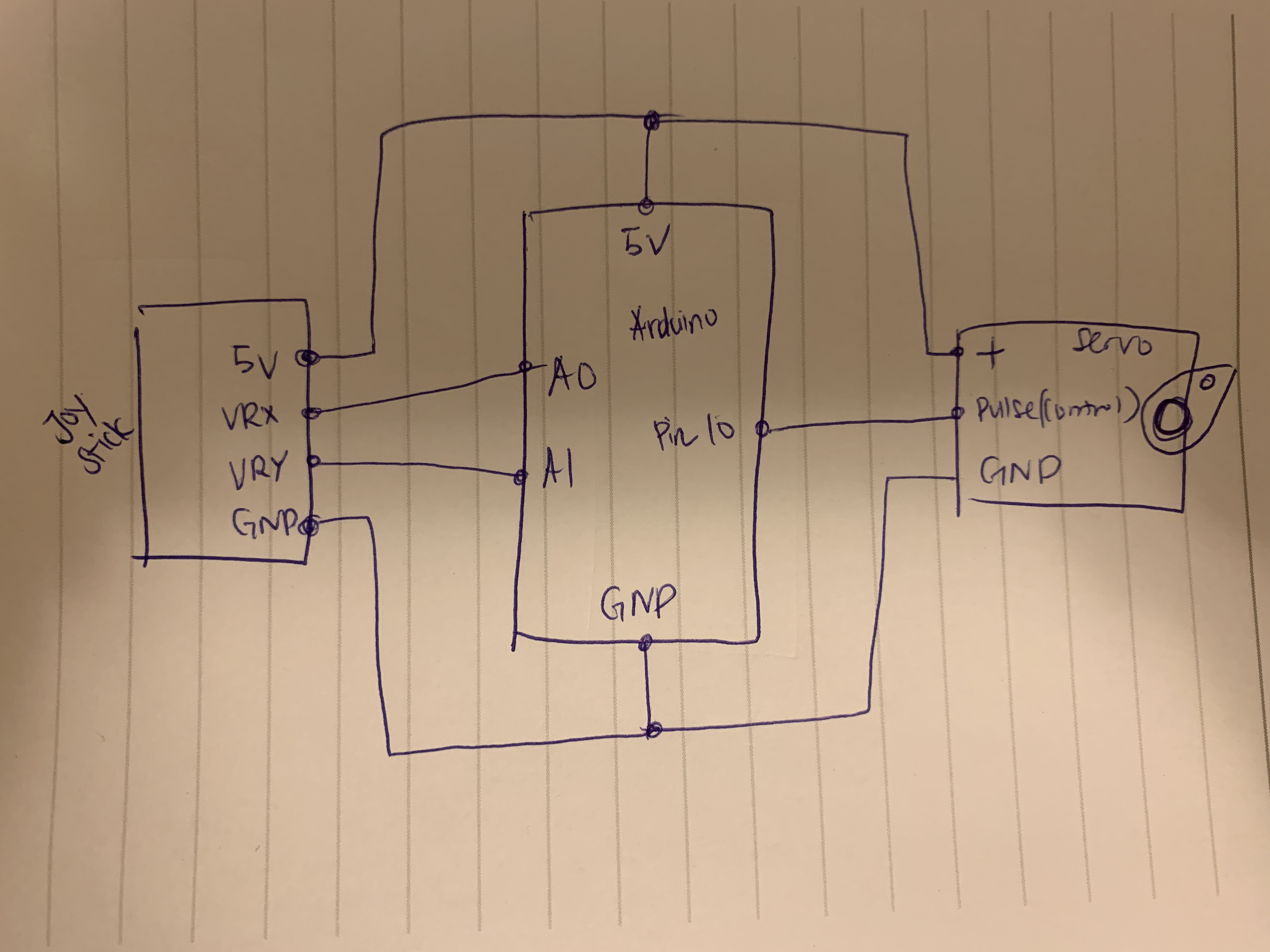
Creating a schematic, circuit, and code that uses an input device to control a motor! Your input device will be the joystick and the motor can be the servo or the DC motor. You must write the motor's position to the Serial port and show the output of the serial port monitor.
Schematic
Firmware
#include <Servo.h> // include servo library
Servo sv1; // create a servo object
void setup(){
sv1.attach(10);// servo motor will be controlled by pin 10
Serial.begin(9600); // starts a serial monitor for value checking
}
void loop() {
int x = analogRead(A0); //A0 pin for reading x value
int y = analogRead(A1); //A1 pin for reading y value
int angle1 = map(x, 0, 1023, 0, 150);//moving up to 150 from 75 in x value.
sv1.write(angle1); //set the srvo position according to the joystick value
int angle2 = map(y, 0, 1023, 0, 150);//moving up to 150 from 75 in y value.
sv1.write(angle2);//set the srvo position according to the joystick value
// Write the current values to the serial monitor
Serial.print("angle1:");
Serial.println(angle1);
Serial.print("angle2:");
Serial.println(angle2);
delay(15); //adding delay
}
Serial Monitor
Circuit's operation

Tada! The servo motor moving by controlling this joystick with a desired degree.